

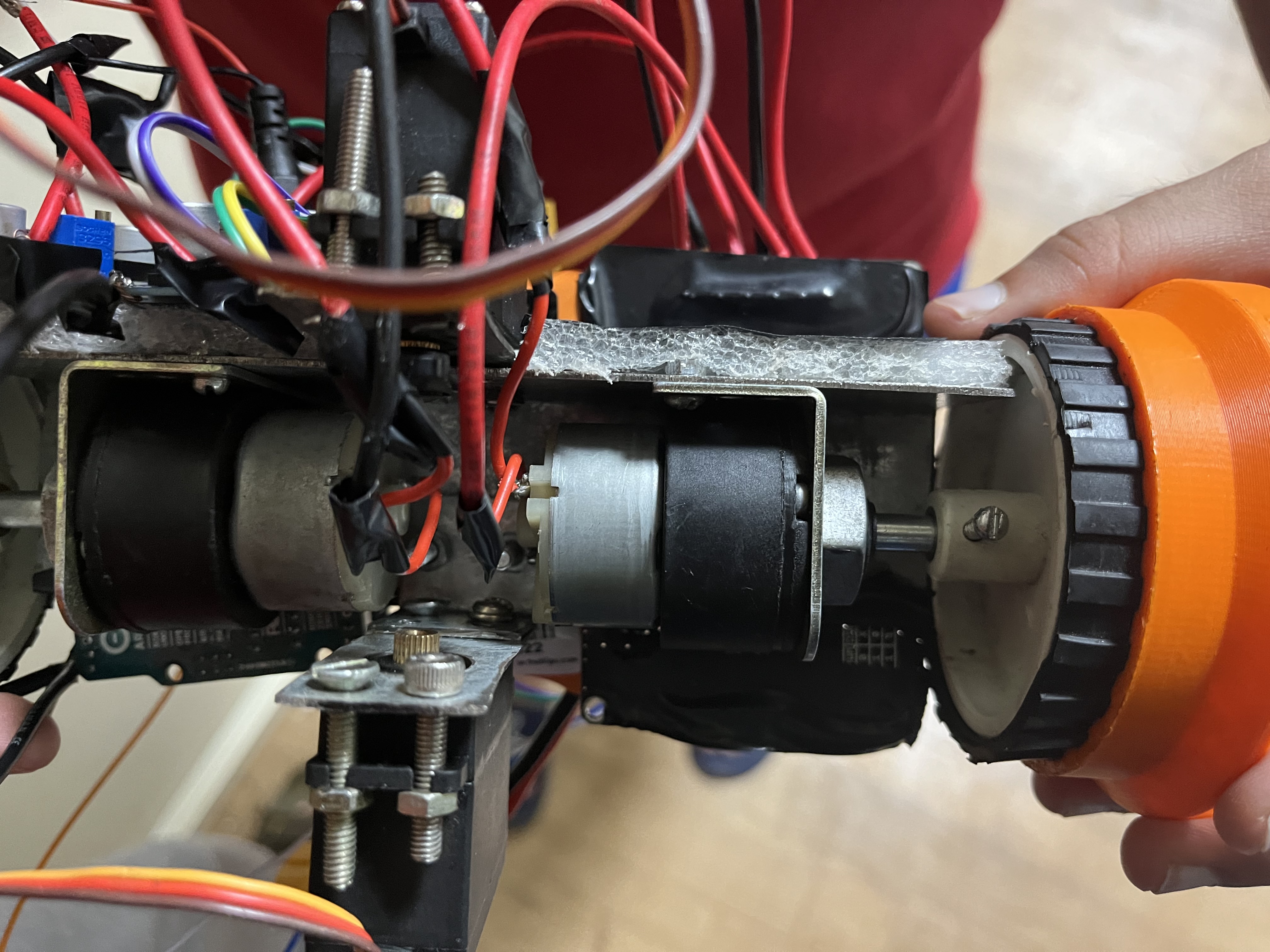
Manufactured the chassi for a Spherical mobile ground robot- StrikeBot.
2 DC motors were used to control the forward and backward motion of the robot. 2 servo motors were used to control the left/right direction of the robot. An IMU was integrated with the current system to reduce damping caused by the inertia of the robot while in motion with the help of 2 weights.
This project was a part of the display in Quark which is the technical festival of our college and was completed within a short time span of 2.5 weeks.