.jpg)
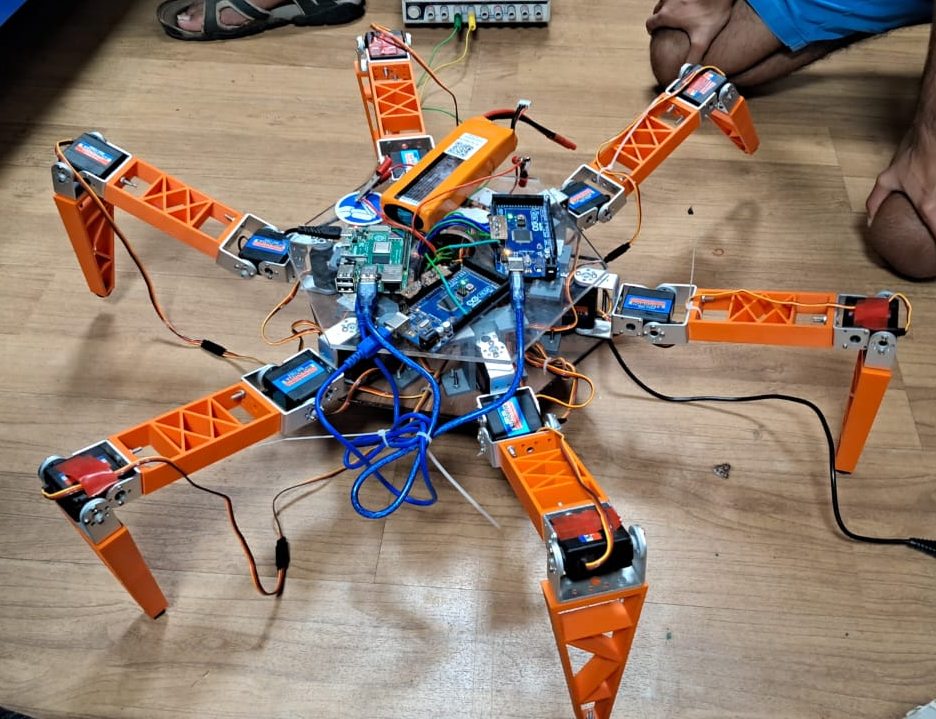
I worked on the manufacturing of a six-legged robot- SpiderBot. Each leg of the robot is controlled using three servo motors giving each leg 3 degrees of freedom.
Currently working on implementing basic bio-inspired gait patterns for the movement of the hexapod. Central Pattern Generators (CPGs) are being tested and implemented on the 18 servo motors for the smooth locomotion of the robot.
The future goal of this project is to integrate sensors like LIDAR, stereocameras, etc to make it completetly autonomous.